
Các yếu tố quan trọng đối với việc quan sát hình ảnh tế bào sống
Trong số các khía cạnh quan trọng nhất cần xem xét trong quan sát hình ảnh tế bào sống trong kính hiển vi là sự chiếu sáng của mẫu vật mỏng phải được giảm xuống mức không gây bất lợi cho sức khỏe và khả năng tồn tại của môi trường nuôi cấy. Không giống như tình huống trong các mẫu vật cố định và gắn kết, một dòng photon lớn (ở cường độ bức xạ thường được áp dụng cho chụp ảnh huỳnh quang và trường sáng) có thể ảnh hưởng nghiêm trọng đến sinh học của các tế bào sống. Về bản chất, hàng triệu năm tiến hóa vẫn chưa phát triển được sự bảo vệ hiệu quả trước cường độ ánh sáng lớn hơn từ 100 đến 10.000 lần so với mức bình thường trên mặt đất.
Hình ảnh kỹ thuật số lý tưởng
Một hình ảnh được định nghĩa là một sự phân bố cường độ tổng thể trong khi một tính năng riêng lẻ là một tập hợp con của các cường độ hình ảnh tạo thành một mẫu. Một đặc điểm có thể đơn giản, chẳng hạn như một điểm hoặc đường thẳng, hoặc rất phức tạp, chẳng hạn như một tập hợp các điểm tạo thành một đối tượng có thể nhận biết được (ví dụ: một hạt nhân). Độ tin cậy trong nhận dạng của một tính năng cụ thể dựa trên mức độ phù hợp của mẫu trong hình ảnh với một bộ tiêu chí cụ thể được đặt cho mẫu đối tượng, kết hợp với tính duy nhất của mẫu trong hình ảnh. Chẳng hạn, việc tìm một điểm sáng đòi hỏi phải phát hiện sự khác biệt về cường độ với nền. Tuy nhiên, việc định vị một điểm sáng cụ thể trong một trường điểm yêu cầu nhiều thông tin hơn về cường độ hoặc vị trí tương đối. Cuối cùng, xác định một tính năng với độ phức tạp của hạt nhân đòi hỏi phải phát hiện các thay đổi cường độ tinh tế được nhóm lại trong bối cảnh liên quan đến không gian. Điểm quan trọng là các tính năng có độ phức tạp khác nhau đòi hỏi lượng thông tin khác nhau để nhận dạng. Mục tiêu trong việc chụp ảnh một mẫu vật cố định là tối đa hóa nội dung thông tin trong ảnh. Ngược lại, một hình ảnh tế bào sống phù hợp chứa vừa đủ thông tin để tự tin xác định tính năng quan tâm. Việc thu thập thêm thông tin có thể làm hỏng các ô hoặc đầu dò được sử dụng để xác định tính năng một cách không cần thiết.
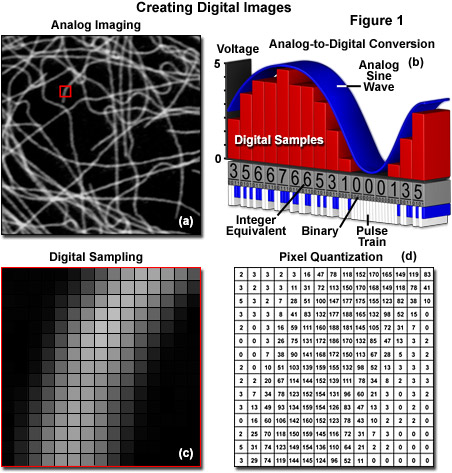
Biểu diễn tương tự của mạng lưới nội chất được làm nổi bật bằng protein huỳnh quang được hợp nhất với các đơn phân tubulin và được chụp bằng kính hiển vi huỳnh quang đồng tiêu đĩa quay được trình bày trong Hình 1 (a). Sau khi lấy mẫu trong mảng hai chiều thông qua bộ chuyển đổi tương tự sang kỹ thuật số bằng mạch camera (Hình 1(b)), mức độ sáng tại các vị trí cụ thể trong hình ảnh tương tự được ghi lại và sau đó được chuyển đổi thành số nguyên trong quá trình lượng tử hóa ( Hình 1(c) và 1(d)). Mục tiêu là chuyển đổi hình ảnh thành một mảng các điểm riêng biệt, mỗi điểm chứa thông tin cụ thể về độ sáng hoặc dải âm được mô tả bằng một giá trị dữ liệu kỹ thuật số cụ thể ở một vị trí chính xác. Quá trình lấy mẫu đo cường độ tại các vị trí liên tiếp trong ảnh và tạo thành một mảng hai chiều chứa các khối thông tin cường độ hình chữ nhật nhỏ. Sau khi lấy mẫu xong, dữ liệu kết quả được lượng tử hóa để gán giá trị độ sáng kỹ thuật số cụ thể cho từng điểm dữ liệu được lấy mẫu, từ màu đen, qua tất cả các sắc thái trung gian của màu xám, đến màu trắng. Kết quả là một đại diện bằng số của cường độ, thường được gọi là một yếu tố hình ảnh hoặc pixel, cho từng điểm dữ liệu được lấy mẫu trong mảng.
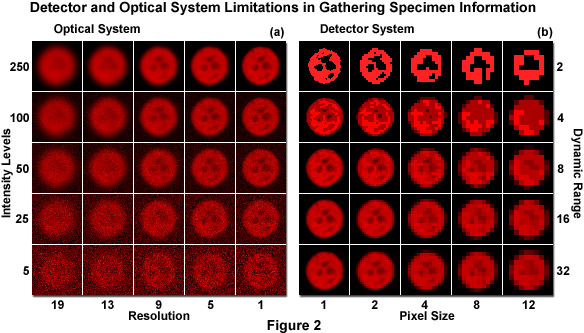
Hệ thống chụp ảnh bằng kính hiển vi huỳnh quang sử dụng ánh sáng để chuyển đổi sự phân bố phân tử (mẫu vật) thành sự phân bố cường độ đại diện (hình ảnh). Theo nghĩa đó, bỏ qua các tạo tác quang học, bất kỳ sự khác biệt nào có thể đo được về cường độ hình ảnh đều liên quan đến thông tin về mẫu vật. Khi một mẫu vật được chiếu sáng bằng ánh sáng, tính chất vật lý của ánh sáng được thu thập bởi các thấu kính và tác hại của bức xạ về cơ bản hạn chế lượng ánh sáng có sẵn để hình thành hình ảnh và các kích thước không gian có thể phân biệt được sự khác biệt về cường độ. Nói cách khác, hệ thống quang học áp đặt một ranh giới trên đối với lượng thông tin có thể thu thập được từ mẫu vật (xem Hình 2(a)). Máy dò hình ảnh (có hiệu lực, máy ảnh kỹ thuật số) còn hạn chế hơn nữa việc thu thập thông tin dựa trên lượng không gian và cường độ được nhóm lại với nhau để tạo ra từng giá trị pixel (xem Hình 2(b)). Ví dụ, một mảng 100 x 100 pixel rõ ràng chứa dung lượng thông tin hạn chế. Việc tăng tổng số pixel lên hai bậc độ lớn, tạo mảng 1000 x 1000 trong khi vẫn giữ nguyên kích thước vật lý, cung cấp nhiều thông tin không gian hơn đáng kể nhưng phải trả giá bằng độ nhạy. Mỗi phần tử mảng (pixel) hiện chỉ thu được lượng ánh sáng bằng một phần trăm. Do đó, việc tạo ra hình ảnh đại diện tối ưu của mẫu vật, đồng thời không gây ra hư hỏng trong quá trình, do đó đòi hỏi kiến thức về các giới hạn quang học của kính hiển vi và các thỏa hiệp phải được thực hiện với hệ thống máy ảnh kỹ thuật số. Ví dụ, một mảng 100 x 100 pixel rõ ràng chứa dung lượng thông tin hạn chế. Việc tăng tổng số pixel lên hai bậc độ lớn, tạo mảng 1000 x 1000 trong khi vẫn giữ nguyên kích thước vật lý, cung cấp nhiều thông tin không gian hơn đáng kể nhưng phải trả giá bằng độ nhạy. Mỗi phần tử mảng (pixel) hiện chỉ thu được lượng ánh sáng bằng một phần trăm. Do đó, việc tạo ra hình ảnh đại diện tối ưu của mẫu vật, đồng thời không gây ra hư hỏng trong quá trình, do đó đòi hỏi kiến thức về các giới hạn quang học của kính hiển vi và các thỏa hiệp phải được thực hiện với hệ thống máy ảnh kỹ thuật số. Ví dụ, một mảng 100 x 100 pixel rõ ràng chứa dung lượng thông tin hạn chế. Việc tăng tổng số pixel lên hai bậc độ lớn, tạo mảng 1000 x 1000 trong khi vẫn giữ nguyên kích thước vật lý, cung cấp nhiều thông tin không gian hơn đáng kể nhưng phải trả giá bằng độ nhạy. Mỗi phần tử mảng (pixel) hiện chỉ thu được lượng ánh sáng bằng một phần trăm. Do đó, việc tạo ra hình ảnh đại diện tối ưu của mẫu vật, đồng thời không gây ra hư hỏng trong quá trình, do đó đòi hỏi kiến thức về các giới hạn quang học của kính hiển vi và các thỏa hiệp phải được thực hiện với hệ thống máy ảnh kỹ thuật số. cung cấp nhiều thông tin không gian hơn đáng kể, nhưng phải trả giá bằng độ nhạy. Mỗi phần tử mảng (pixel) hiện chỉ thu được lượng ánh sáng bằng một phần trăm. Do đó, việc tạo ra hình ảnh đại diện tối ưu của mẫu vật, đồng thời không gây ra hư hỏng trong quá trình, do đó đòi hỏi kiến thức về các giới hạn quang học của kính hiển vi và các thỏa hiệp phải được thực hiện với hệ thống máy ảnh kỹ thuật số. cung cấp nhiều thông tin không gian hơn đáng kể, nhưng phải trả giá bằng độ nhạy. Mỗi pixel hiện chỉ thu được lượng ánh sáng bằng 1%. Do đó, việc tạo ra hình ảnh đại diện tối ưu của mẫu vật, đồng thời không gây ra hư hỏng trong quá trình, do đó đòi hỏi kiến thức về các giới hạn quang học của kính hiển vi và các thỏa hiệp phải được thực hiện với hệ thống máy ảnh kỹ thuật số.
Độ tin cậy trong việc xác định danh tính của một tính năng dựa trên các nguyên tắc xung quanh phép đo. Như một ví dụ trừu tượng, hãy xem xét 100 phép xác định riêng biệt về độ dài của một cây bút bi bằng cách sử dụng một số thước kẻ nhựa đã phân loại. Các giá trị đo lường gộp tạo thành một phân phối, trong đó giá trị trung bình biểu thị giá trị gần đúng nhất của chiều dài bút và mức chênh lệch biểu thị mức độ tin cậy trong giá trị trung bình đó. Một phân phối có 50 giá trị được nhóm chặt chẽ chính xác hơn nhiều so với mức trung bình từ năm phép đo có khoảng cách rộng. Độ phân tán dữ liệu, đại diện cho độ chính xác của các phép đo, rất quan trọng do thực tế là phân phối rộng, không đối xứng cao hoặc đa phương thức làm giảm mức độ tin cậy và cho thấy lỗi đo lường.
Mỗi hình ảnh được thu thập trong quá trình thử nghiệm tạo thành một phép đo riêng lẻ, trong đó thông tin trong hình ảnh góp phần vào mức độ tin cậy của kết quả cuối cùng. Hình ảnh của các tế bào sống thường sần sùi, mềm và có bố cục kém, nhưng vẫn có thể biểu thị lượng thông tin tối đa có thể trích xuất từ mẫu vật trong các điều kiện thí nghiệm phổ biến. Đồng nghĩa với ví dụ về độ dài bút được mô tả ở trên, độ tin cậy trong các tuyên bố về nhận dạng tính năng trong hình ảnh tế bào sống dựa trên việc thu thập nhiều ví dụ về tính năng, đánh giá phạm vi phương sai và chứng minh rằng tính năng này không khác biệt với điều khiển tích cực. Tóm lại, ngay cả khi một hình ảnh thiếu tính thẩm mỹ, nó vẫn đại diện cho một ứng cử viên phù hợp nếu nó chứa thông tin cần thiết để phát hiện một đặc điểm và tiếp tục kiểm tra một giả thuyết.
Hình ảnh tế bào sống liên quan đến sự thỏa hiệp đáng kể giữa chất lượng hình ảnh và khả năng tồn tại của mẫu vật. Đảm bảo kết hợp tốt đòi hỏi sự hiểu biết thực tế về chất lượng hình ảnh. Để bắt đầu, mối quan hệ giữa các đơn vị đại diện được sử dụng để mô tả chất lượng hình ảnh (pixel và mức xám) với các đơn vị vật lý của phép đo mẫu thử (nanomet và thông lượng photon) phải được thiết lập. Lý tưởng nhất là mọi giá trị pixel trong ảnh sẽ biểu thị số lượng photon chính xác phát sinh từ một khu vực được xác định chính xác của mẫu vật, độc lập với tất cả các pixel lân cận. Thật không may, đó không bao giờ là trường hợp. Các giá trị cấp độ xám và mức độ mà các thành phần hình ảnh (pixel) xác định hình thái của một đối tượng là các ước tính tương đối.
Cường độ sáng của kính hiển vi
Hành động mở màn trập máy ảnh cho phép năng lượng ánh sáng được tập trung vào mảng cảm biến hình ảnh (thường là thiết bị ghép điện tích, CCD) và được thu thập trong các phần tử pixel. Theo thời gian, sự chuyển đổi tích lũy của photon thành electron (quang điện tử) tiết lộ phân phối Poisson của các sự kiện. Nói cách khác, sự phát xạ photon có đặc tính cơ bản là ngẫu nhiên (ngẫu nhiên) đối với thời gian. Ngoài các quang điện tử (cấu thành tín hiệu) được tập hợp trong các phần tử mảng, các điện tử giả cũng tích tụ ngẫu nhiên (nhiễu). Bản chất ngẫu nhiên của cả hai sự kiện này có ảnh hưởng xác định đến khả năng đặt một giá trị chính xác cho cường độ ánh sáng (xem Hình 3(a)). Nếu một hình ảnh được chụp mà không có ánh sáng chiếu vào cảm biến, thì các electron độc lập với tín hiệu (được gọi là nhiễu tối) thu thập và hình thành một phân phối, được đặc trưng bởi giá trị trung bình và độ lệch chuẩn. Giá trị trung bình đại diện cho nền trong khi độ lệch chuẩn mô tả độ không đảm bảo hoặc nhiễu hệ thống vốn có trong giá trị tín hiệu. Khi một pixel thu thập ánh sáng, các quang điện tử từ cả mẫu vật và nhiễu ngẫu nhiên được tạo ra trong cảm biến được thu thập đồng thời, nhưng chúng không thể phân biệt được với nhau. Giá trị nền, được tính toán từ một hình ảnh tối, thường được trừ đi từ mỗi giá trị pixel trong hình ảnh, nhưng độ không đảm bảo do nhiễu (được ước tính là độ lệch chuẩn của nền trung bình) không được trừ đi một cách đơn giản. Mỗi pixel chứa các electron tín hiệu và nhiễu được chuyển đổi thành một giá trị số nguyên biểu thị cường độ hoặc mức xám.
Rõ ràng là mỗi giá trị pixel chỉ đại diện cho một ước tính thống kê về thông lượng photon được liên kết với một vùng cụ thể trong mẫu vật. Vì các mức cường độ tương đối bao gồm toàn bộ tập hợp dữ liệu trong một hình ảnh nên mọi ước tính về cường độ đều có liên quan đến các mức độ tin cậy khác nhau (tùy thuộc vào tỷ lệ tín hiệu trên tạp âm, được mô tả bên dưới). Vì mỗi giá trị pixel cấu thành phép đo đơn lẻ của quá trình Poisson, tỷ lệ cược của giá trị đơn lẻ đó biểu thị mức trung bình dài hạn của thông lượng photon được xấp xỉ gần đúng bằng một giá trị bình thường ( Gaussian), với độ lệch chuẩn đầu tiên bằng căn bậc hai của giá trị pixel. Lưu ý rằng mối quan hệ căn bậc hai là rất quan trọng vì nó xác định độ tin cậy tối đa của một phép đo thông lượng photon đơn lẻ, ngay cả khi tất cả nhiễu điện tử bị loại bỏ.
Yếu tố quan trọng nhất trong kính hiển vi kỹ thuật số của tế bào sống là chỉ có thể ước tính lượng ánh sáng bắt nguồn từ một vùng cụ thể của mẫu vật và độ tin cậy của ước tính đó phụ thuộc vào độ lớn của tín hiệu và nhiễu trong phép đo hệ thống. Nói cách khác, mọi thứ trong hình ảnh tế bào sống cuối cùng đều quy về vấn đề tín hiệu nhiễu. Do đó, danh pháp phổ biến nhất để chỉ định chất lượng dữ liệu thu được từ máy dò được gọi là tỷ lệ tín hiệu trên nhiễu và tỷ lệ 2,7:1 đã được đề xuất là giới hạn dưới cho khả năng phát hiện tín hiệu qua nhiễu. Lấy một ví dụ đơn giản, hãy xem xét hai lần phơi sáng liên tiếp, một với màn trập máy ảnh đóng và một với màn trập mở. Trong trường hợp giả định này, hình ảnh tối có giá trị pixel trung bình là 50 và độ lệch chuẩn là 7. Tương tự như vậy, hình ảnh mẫu vật có giá trị pixel là 114, cao hơn đáng kể so với nền. Tín hiệu bằng giá trị mẫu trừ nền (114 – 50 = 64). Tổng nhiễu từ hệ thống có giá trị là 7 (giá trị này cũng có thể được ước tính là căn bậc hai của giá trị hình ảnh tối, 50) được cộng theo phương trình cầu phương cho nhiễu đếm photon, bằng căn bậc hai của 64. Chỉ cần chia tín hiệu (64) cho nhiễu (căn bậc hai của tổng: 50 + 64) mang lại tỷ lệ tín hiệu trên tạp âm khoảng 6. Khi giá trị pixel của mẫu vật giảm xuống dưới mức trung bình 73, trong đó tỷ lệ tín hiệu trên tạp âm đạt tới 2,7, thì khả năng cao là giá trị này có liên quan đến dao động thống kê, thay vì tín hiệu, phát triển cao một cách khó chịu. Theo nguyên tắc chung, mỗi đơn vị tín hiệu nhiễu tương đương với một độ lệch chuẩn so với giá trị tín hiệu trung bình. Do đó, 2,7 độ lệch chuẩn ngụ ý độ tin cậy hợp lý để phát hiện tín hiệu trong hầu hết các ứng dụng. Tuy nhiên, cần lưu ý rằng các yêu cầu về tín hiệu trên tạp âm phụ thuộc vào loại phân tích được sử dụng để định lượng hình ảnh. Ví dụ: phân tích không giám sát dựa trên ngưỡng sẽ yêu cầu mức nhiễu tín hiệu cao hơn mà chỉ sử dụng quan sát trực quan để đếm các sự kiện. Khi các giá trị pixel của mẫu giảm xuống dưới mức trung bình là 73, trong đó tỷ lệ tín hiệu trên tạp âm đạt tới 2,7, thì khả năng giá trị này liên quan đến dao động thống kê, thay vì tín hiệu, sẽ tăng cao một cách khó chịu. Theo nguyên tắc chung, mỗi đơn vị tín hiệu nhiễu tương đương với một độ lệch chuẩn so với giá trị tín hiệu trung bình. Do đó, 2,7 độ lệch chuẩn ngụ ý độ tin cậy hợp lý để phát hiện tín hiệu trong hầu hết các ứng dụng. Tuy nhiên, cần lưu ý rằng các yêu cầu về tín hiệu trên tạp âm phụ thuộc vào loại phân tích được sử dụng để định lượng hình ảnh. Ví dụ: phân tích không giám sát dựa trên ngưỡng sẽ yêu cầu mức nhiễu tín hiệu cao hơn mà chỉ sử dụng quan sát trực quan để đếm các sự kiện. Khi các giá trị pixel của mẫu giảm xuống dưới mức trung bình là 73, trong đó tỷ lệ tín hiệu trên tạp âm đạt tới 2,7, thì khả năng giá trị này liên quan đến dao động thống kê, thay vì tín hiệu, sẽ tăng cao một cách khó chịu. Theo nguyên tắc chung, mỗi đơn vị tín hiệu nhiễu tương đương với một độ lệch chuẩn so với giá trị tín hiệu trung bình. Do đó, 2,7 độ lệch chuẩn ngụ ý độ tin cậy hợp lý để phát hiện tín hiệu trong hầu hết các ứng dụng. Tuy nhiên, cần lưu ý rằng các yêu cầu về tín hiệu trên tạp âm phụ thuộc vào loại phân tích được sử dụng để định lượng hình ảnh. Ví dụ: phân tích không giám sát dựa trên ngưỡng sẽ yêu cầu mức nhiễu tín hiệu cao hơn mà chỉ sử dụng quan sát trực quan để đếm các sự kiện. thay vì tín hiệu, phát triển cao một cách khó chịu. Theo nguyên tắc chung, mỗi đơn vị tín hiệu nhiễu tương đương với một độ lệch chuẩn so với giá trị tín hiệu trung bình. Do đó, 2,7 độ lệch chuẩn ngụ ý độ tin cậy hợp lý để phát hiện tín hiệu trong hầu hết các ứng dụng. Tuy nhiên, cần lưu ý rằng các yêu cầu về tín hiệu trên tạp âm phụ thuộc vào loại phân tích được sử dụng để định lượng hình ảnh. Ví dụ: phân tích không giám sát dựa trên ngưỡng sẽ yêu cầu mức nhiễu tín hiệu cao hơn mà chỉ sử dụng quan sát trực quan để đếm các sự kiện. thay vì tín hiệu, phát triển cao một cách khó chịu. Theo nguyên tắc chung, mỗi đơn vị tín hiệu nhiễu tương đương với một độ lệch chuẩn so với giá trị tín hiệu trung bình. Do đó, 2,7 độ lệch chuẩn ngụ ý độ tin cậy hợp lý để phát hiện tín hiệu trong hầu hết các ứng dụng. Tuy nhiên, cần lưu ý rằng các yêu cầu về tín hiệu trên tạp âm phụ thuộc vào loại phân tích được sử dụng để định lượng hình ảnh. Ví dụ: phân tích không giám sát dựa trên ngưỡng sẽ yêu cầu mức nhiễu tín hiệu cao hơn mà chỉ sử dụng quan sát trực quan để đếm các sự kiện. cần lưu ý rằng các yêu cầu về tín hiệu trên tạp âm phụ thuộc vào loại phân tích được sử dụng để định lượng hình ảnh. Ví dụ: phân tích không giám sát dựa trên ngưỡng sẽ yêu cầu mức nhiễu tín hiệu cao hơn mà chỉ sử dụng quan sát trực quan để đếm các sự kiện. cần lưu ý rằng các yêu cầu về tín hiệu trên tạp âm phụ thuộc vào loại phân tích được sử dụng để định lượng hình ảnh. Ví dụ: phân tích không giám sát dựa trên ngưỡng sẽ yêu cầu mức nhiễu tín hiệu cao hơn mà chỉ sử dụng quan sát trực quan để đếm các sự kiện.
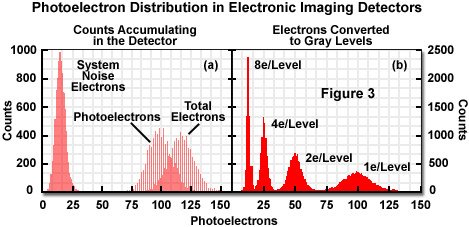
Trình bày trong Hình 3 là một hình minh họa mô tả cách các điện tử tín hiệu và tạp âm xuất hiện ngẫu nhiên theo thời gian. Trong Hình 3(a), phân bố mô phỏng của số lượng được thu thập trong một phần tử máy dò duy nhất trên 10.000 lần phơi sáng được hiển thị. Các electron (nhiễu) độc lập với tín hiệu, đại diện cho dòng điện tối và nhiễu đầu ra, tạo thành sự phân bố nhiễu hệ thống với trung bình là 16 và độ lệch chuẩn là 4. Sự phân bố của các quang điện tử từ mẫu vật có trung bình là 100 và độ lệch chuẩn của 10. Máy dò ghi lại tín hiệu kết hợp và các quang điện tử nhiễu để mang lại giá trị trung bình là 110 và độ lệch chuẩn trong khoảng từ 10 đến 11. Hình 3(b) minh họa việc chuyển đổi tín hiệu sang mức xám bằng cách sử dụng 1, 2, 4 hoặc 8 electron trên mỗi mức xám.
Trong thực tế, ánh sáng từ các nguồn bên ngoài và nhiễu điện tử được ước tính cùng nhau bằng cách tính giá trị trung bình và độ lệch chuẩn từ khu vực gần mẫu thay vì khung tối được chụp mà không có ánh sáng nào được đưa vào máy ảnh. Nền có thể thay đổi từ hình ảnh này sang hình ảnh khác và phải được lấy từ đủ pixel (hơn 36) để tạo ước tính chắc chắn cho giá trị trung bình và độ lệch chuẩn. Tín hiệu thường được tính bằng giá trị trung bình của một vài pixel được liên kết chặt chẽ trừ đi giá trị nền đã tính toán trước đó. Xấp xỉ giá trị nhiễu, như mô tả ở trên, được tạo ra bằng cách cộng các thành phần nhiễu theo bậc hai, sử dụng căn bậc hai của giá trị tín hiệu để ước tính nhiễu khi cần thiết. Tỷ lệ tín hiệu trên tạp âm cuối cùng hiện có tính đến ảnh hưởng của ánh sáng đi lạc không mong muốn.
Độ tin cậy của ước tính cường độ có thể được tăng lên thông qua tổng hợp dữ liệu hoặc tính trung bình. Rõ ràng là việc sử dụng giá trị trung bình từ 50 pixel để biểu thị cường độ là một lý lẽ mạnh mẽ hơn nhiều so với việc khẳng định rằng cường độ từ một pixel đơn lẻ biểu thị chính xác cường độ thực của mẫu vật. Tổng hợp hoặc tính trung bình một khối pixel với nhau, một kỹ thuật thường được gọi là binning, làm tăng độ tin cậy (cường độ) với chi phí cho độ phân giải không gian. Tương tự như vậy, việc lấy trung bình các khung liên tiếp cùng nhau làm tăng độ tin cậy với chi phí giải quyết thời gian. Mức tăng tín hiệu trên tạp âm thu được bằng cách lấy trung bình theo không gian hoặc theo thời gian thường tỷ lệ thuận với căn bậc hai của số pixel được lấy trung bình. Do đó, với điều kiện là tín hiệu không đổi và nhiễu là ngẫu nhiên, trung bình bốn khung hình sẽ giảm nhiễu xuống 2 lần, trong khi lấy trung bình 16 pixel giảm nhiễu xuống 4 lần. Bằng cách sử dụng nhiều hơn một điện tử cho mỗi mức xám, độ tin cậy được tăng lên với chi phí nhạy cảm. Một máy dò có hiệu quả thu thập hoàn hảo và mức nhiễu 4 electron sẽ báo cáo 100 photon là 99 đến 101 ít hơn 10 phần trăm thời gian, nhưng ở mức 4 electron trên mỗi mức xám, giá trị từ 24 đến 26 được báo cáo khoảng 40% thời gian sau khi trừ nền.
Mối quan hệ giữa cường độ và độ tương phản
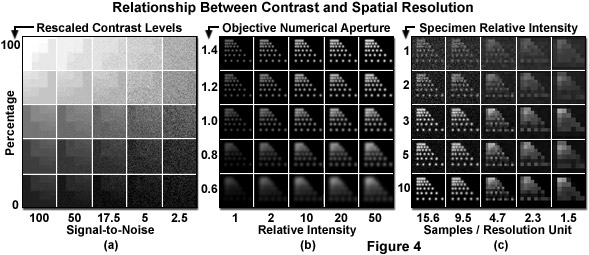
Thuật ngữ tương phản là một giá trị chủ quan thường đề cập đến mối quan hệ giữa màu đen (không có tín hiệu) và màu trắng (tín hiệu tối đa) cùng với các sắc thái xen kẽ của màu xám. Khi xem một dải màu tuyến tính gồm tám bước cường độ đơn sắc từ đen sang trắng, các chuyển tiếp xuất hiện khác biệt (như minh họa trong Hình 4(a)). Khi các sắc thái bổ sung của màu xám được thêm vào giữa toàn bộ màu đen và trắng, độ tin cậy trong việc tìm kiếm các bước tương phản riêng lẻ sẽ giảm đi. Cuối cùng, việc xác định thời điểm một bóng râm dừng lại và một bóng râm khác bắt đầu không còn rõ ràng nữa vì tiếng ồn do các quá trình thị giác và thần kinh của con người tạo ra phù hợp với sự khác biệt trong bước cường độ. Số lượng các bước có thể phân giải giữa đen và trắng xác định phạm vi tương phản và do đó, số lượng đơn vị thông tin có thể có từ cường độ.
Một hệ thống máy ảnh kỹ thuật số cấp độ nghiên cứu điển hình có dải tương phản khả dụng lớn hơn đáng kể so với mắt người thích nghi với ánh sáng. Mặc dù mắt gặp vấn đề trong việc xác định chính xác hơn khoảng 100 sắc độ xám (tốt nhất), máy ảnh cấp độ khoa học thường có thể phân giải hàng nghìn mức xám nằm giữa độ bão hòa (màu trắng) và không có tín hiệu (màu đen). Các điều chỉnh về độ tương phản thường được áp dụng sau khi chụp ảnh, bằng cách chia tỷ lệ các giá trị pixel tương đối bằng công cụ được gọi là bảng tra cứu (LUT), có sẵn trong hầu hết các gói phần mềm thu thập và chỉnh sửa ảnh. Chia tỷ lệ các giá trị cường độ hình ảnh để phù hợp với tầm nhìn bình thường của con người hỗ trợ diễn giải dữ liệu bằng hình ảnh.
Trong hình ảnh kỹ thuật số đơn sắc (thang độ xám) với 1000 mức độ tương phản, nếu đặc điểm được quan sát nằm ở phần sáng hơn của hình ảnh, thì đặc điểm đó có thể bị mờ và khó xác định. Hiện tượng này xảy ra do 1000 mức xám trong hình ảnh phải được nén xuống dưới 256 giá trị để hiển thị trên màn hình máy tính và mắt người chỉ có thể phân biệt được một phần của phạm vi tương phản đã giảm đó. Nếu phạm vi cường độ của tính năng kéo dài 50 bước tương phản trong hình ảnh gốc (ví dụ: mức xám giữa các giá trị 900 và 950), nó có thể chỉ xuất hiện dưới dạng 5 hoặc 10 bước trên màn hình và hầu như không thể phân biệt được bằng mắt người. Bằng cách đặt tất cả các giá trị hình ảnh giảm xuống dưới 750 thành toàn màu đen (mức xám bằng 0), tiếp theo là thay đổi tỷ lệ các giá trị trong khoảng từ 750 đến 1000 để hiển thị từ 0 đến 255 (đen sang trắng) trên màn hình, độ tương phản hiệu quả sẽ lớn hơn trong phạm vi tương phản bao gồm tính năng quan tâm. Tính năng này sẽ trở nên dễ nhận dạng hơn vì phạm vi tương phản mới được chia tỷ lệ lý tưởng hơn cho nhận thức của con người. Tuy nhiên, nếu cường độ tính năng chỉ kéo dài năm bước tương phản trong số 1000 trong ảnh gốc, thì việc điều chỉnh độ tương phản sẽ không hỗ trợ trong việc giải quyết nhận dạng tính năng.
Tại thời điểm này, khái niệm về độ tương phản giờ đây có thể được đặt vào quan điểm liên quan đến chất lượng hình ảnh. Lưu ý rằng độ tương phản, vì mục đích của cuộc thảo luận này, đã được định nghĩa là thước đo cường độ tương đối và phạm vi tương phản là số bước tương phản có thể được phân biệt trong một hình ảnh. Quyết định liệu hai pixel hoặc các vùng cường độ có tạo thành các mức độ tương phản hoặc cường độ khác nhau hay không là một câu hỏi về độ tin cậy thống kê. Ví dụ: với các thuộc tính nhiễu của hình ảnh, liệu một vùng có thể được chọn là khác với vùng kia hơn 15 lần trong số 20 vùng không? Câu hỏi này tương tự trực tiếp với việc coi một giá trị là tín hiệu và giá trị kia là nhiễu và hỏi xem có bằng chứng hợp lý nào cho thấy tỷ lệ tín hiệu trên nhiễu vượt quá giá trị 2,7 (tối thiểu để nhận dạng tính năng) hay không.
Độ phân giải trong hình ảnh kỹ thuật số Live-Cell
Định nghĩa đơn giản nhất về độ phân giải không gian là khả năng xác định sự khác biệt về cường độ giữa hai nguồn sáng điểm. Trong trường hợp hai điểm sáng bằng nhau được dịch lại gần nhau hơn theo từng bước nhỏ, các điểm vẫn được giải quyết khi chênh lệch cường độ trong không gian giữa chúng lớn hơn cường độ dự kiến đối với nhiễu (xem Hình 4(b)). Trong kính hiển vi huỳnh quang, khoảng cách phân giải tối thiểu, được gọi là giới hạn phân giải, cuối cùng được xác định bởi các tính chất vật lý của ánh sáng và các thông số kỹ thuật của vật kính. Khi một fluorophore được tập trung vào một khu vực nhỏ dần, kích thước điểm thu được sẽ ngừng co lại khi nó đạt đến đường kính chỉ lớn hơn giới hạn độ phân giải của vật kính. Do đó, kích thước điểm bị giới hạn bởi các thuộc tính nhiễu xạ khách quan (khẩu độ số). Hai nguồn điểm được thảo luận ở trên có vẻ lớn hơn ở cùng độ phóng đại khi sử dụng vật kính có độ phân giải thấp và nhỏ hơn đối với vật kính có độ phân giải cao (xem Hình 4(b)). Do đó, hai nguồn điểm cách nhau một khoảng như nhau có nhiều khả năng được giải quyết, theo các tiêu chí trên, với vật kính có độ phân giải cao. Bằng cách mở rộng, một cạnh hoặc một đường trong hệ thống có độ phân giải cao sẽ trở nên mềm hơn trong hệ thống có độ phân giải thấp.
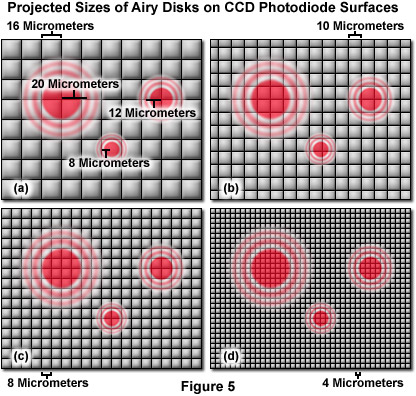
Đối với hình ảnh ô trực tiếp, tỷ lệ lấy mẫu được đề xuất là từ 3 đến 8 pixel trên mỗi đơn vị độ phân giải (thường khó đạt được) để thu thập phần lớn thông tin được giải quyết. Giới hạn lấy mẫu Nyquist thường được đề xuất là hai pixel trên mỗi đơn vị độ phân giải được trình bày sai cho loại hình ảnh này. Nyquist đã chứng minh rằng có thể sử dụng 2,3 mẫu rời rạc trên mỗi thành phần tần số tối thiểu để tái tạo lại thông tin ở dạng sóng tín hiệu, với điều kiện là chức năng cơ bản chính xác được sử dụng trong quy trình. Các hệ thống tạo ảnh dựa trên máy ảnh, cũng như hầu hết các hệ thống quét điểm, sử dụng một mảng pixel lưới Cartesian vuông (xem Hình 5). Tín hiệu được tích hợp giữa các điểm thay vì được lấy mẫu tại các điểm riêng biệt, dẫn đến hiện tượng lấy mẫu xuyên suốt hoặc không độc lập đối với các điểm được phân giải quang học nếu có quá ít pixel. Việc giải quyết các phần tử đối tượng trong hình ảnh không song song hoặc vuông góc với mảng pixel yêu cầu mức độ lấy mẫu cao hơn vì các trung tâm pixel cách xa nhau hơn theo tỷ lệ trong mảng Descartes. Cuối cùng, cường độ điểm ảnh gần như luôn được tái tạo dưới dạng giá trị thô mà không cần hiệu chỉnh mật độ lấy mẫu hoặc bất kỳ bước sóng hoặc mẫu cơ bản nào. Việc phóng to hình ảnh được chiếu tới máy dò sao cho chỉ có hai pixel bao phủ mỗi khoảng cách đã phân giải sẽ không thu được tất cả thông tin có sẵn từ hệ thống quang học. Trong nhiều ứng dụng live-cell, cường độ tín hiệu thường đạt được bằng cách lấy độ phân giải không gian.
Minh họa trong Hình 5 là hình ảnh của các đĩa Airy được tạo ra bởi các vật kính khẩu độ số cao (40x, 60x và 100x), thường được sử dụng trong chụp ảnh tế bào sống, được chiếu lên bề mặt của các mảng điểm ảnh có các điốt quang có kích thước thay đổi từ 4 đến 16 micromet . Vật kính 100x, với khẩu độ số 1,4, chiếu một đĩa có kích thước đường kính 40 micromet với tiêu chí độ phân giải xấp xỉ 20 micromet. Tương tự như vậy, vật kính 60x (cũng là khẩu độ số 1,4) tạo ra đơn vị độ phân giải là 12 micromet, trong khi vật kính 40x (khẩu độ số 1,3) tạo ra đơn vị phân giải có chiều dài 8 micromet. Lưu ý rằng dạng hình học mảng đi-ốt quang 16 micromet nằm dưới độ phân giải quang học của kính hiển vi đối với cả ba vật kính. Mảng 10 micromet phân giải vật kính 100x với 3 pixel trên mỗi đơn vị độ phân giải, nhưng không đáp ứng được các yêu cầu về độ phân giải cho các vật kính 60x và 40x (mảng 8 micromet cũng vậy). Ngược lại, mảng pixel 4 micromet đáp ứng yêu cầu về độ phân giải tối thiểu đối với vật kính 40x và vượt xa yêu cầu về độ phân giải của vật kính 60x và 100x. Phần lớn các máy ảnh CCD kỹ thuật số khoa học hiện đang được sử dụng phổ biến có kích thước pixel từ 8 đến 16 micromet, trong khi nhiều máy ảnh tiêu dùng được trang bị cảm biến hình ảnh có các pixel nhỏ hơn trong phạm vi 4 micromet. Mặc dù kích thước điểm ảnh được cố định trong máy ảnh kỹ thuật số, độ phân giải quang học của kính hiển vi có thể dễ dàng được sửa đổi để phù hợp với độ phân giải quang học của hệ thống hình ảnh có độ phóng đại trung gian thông qua ứng dụng của bộ ghép nối chuyên dụng. Tuy nhiên, sử dụng độ phóng đại trung gian có thể dẫn đến chi phí đáng kể về mức tín hiệu và chất lượng hình ảnh.
Thực tế đơn thuần của việc thiết lập giới hạn độ phân giải có nghĩa là không thể đo được khoảng cách giữa hai nguồn sáng điểm nếu nó nằm dưới giới hạn đó. Ví dụ: báo cáo hai tính năng cách nhau một phần tư micromet, sử dụng thấu kính có giới hạn độ phân giải 1 micromet, rất đáng ngờ. Tuy nhiên, khoảng cách giữa hai điểm cách xa nhau hơn giới hạn độ phân giải có thể được đo với độ chính xác cao hơn giới hạn độ phân giải. Tâm của một điểm phát sáng duy nhất có thể được ước tính trong phạm vi 10 nanomet, phụ thuộc vào tốc độ lấy mẫu và tỷ lệ tín hiệu trên tạp âm. Do đó, khoảng cách giữa hai điểm phát sáng bất kỳ, khi lớn hơn giới hạn độ phân giải, có thể được đo với độ chính xác hàng chục nanomet.
Tóm lại, độ tương phản và độ phân giải được liên kết chặt chẽ với nhau trong hình ảnh (như minh họa trong Hình 2(a) và 4(b)). Độ phân giải được xác định bởi khả năng thể hiện độ tương phản giữa hai điểm trong một hình ảnh. Rõ ràng, việc tạo độ tương phản là cần thiết để thu được độ phân giải của hệ thống hình ảnh. Tương tự, khi độ phân giải quang học thay đổi, cường độ tín hiệu trên mỗi pixel và do đó mức độ không chắc chắn trong nhận dạng tính năng cũng sẽ thay đổi. Điều quan trọng là độ phân giải và độ tương phản phải được xem xét cùng nhau khi khớp nội dung thông tin của hình ảnh với các yêu cầu để nhận dạng tính năng trong hình ảnh tế bào sống.
Nguồn: https://zeiss-campus.magnet.fsu.edu/articles/livecellimaging/digitalimaging.html\
Công ty Minh Khang là nhà phân phối độc quyền thị trường miền Nam phân khúc kính hiển vi hãng Carl ZEISS.

 EN
EN